Transitions
Introduction
While States define "where you can be" in a GUI, Transitions define "how you get there." Every State that is reachable needs an associated StateTransitions class that defines the pathways to and from other states.
Formally, a transition is a process or a sequence of actions that changes the GUI from one state to another. They form the "edges" of the state graph and are the building blocks used by the framework's pathfinder to navigate the application.
The Brobot Implementation: FromTransition and ToTransition
Brobot implements this concept by splitting transitions into two types: FromTransitions and ToTransitions. This two-part system provides a clear and reusable structure for managing navigation logic.
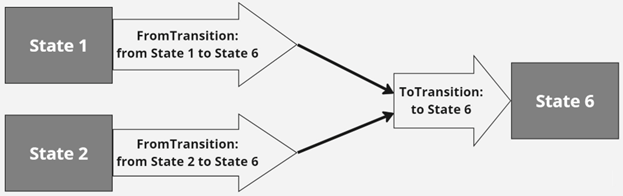 This diagram is based on Figure 8 from the research paper.
This diagram is based on Figure 8 from the research paper.
-
FromTransition: This handles the process of leaving the current state to go to another state. For example, to go from
State AtoState B, the FromTransitionA -> Bis called. It contains the specific actions needed to initiate the move from State A. -
ToTransition: This handles the final steps of arriving at a new state, regardless of which state started the process. There can be multiple FromTransitions going to
State Bfrom different states, but there is only one ToTransition forState B. This-> Btransition contains generic actions that must always run to confirmState Bis active.
Defining Transitions in Code
In the StateTransitions Builder, you define these two types of transitions using specific commands:
addTransitionFinishcreates the ToTransition. The method passed to it is typically namedfinishTransition().addTransitioncreates a FromTransition. The methods passed to it can have any name and contain the actions for that specific path.
// From the DoT test application in the paper
public class WorldTransitions {
// ...
StateTransitions transitions =
new StateTransitions.Builder(WORLD) // Defines transitions from the WORLD state
.addTransitionFinish(this::finishTransition) // This is the ToTransition for WORLD
.addTransition(new StateTransition.Builder() // This is a FromTransition
.addToActivate(ISLAND) // The target state is ISLAND
.setFunction(this::goToIsland) // The method with the actions
.build())
.build();
// ...
}
The Formal Model (Under the Hood)
The academic paper provides a formal definition for a transition as a tuple t = (A, Stdef).
- A is a process, which is a sequence of one or more actions
(a¹, a², ..., aⁿ). This corresponds to the method you pass to the builder (e.g.,goToIsland). - Stdef is the intended state information. This is an explicit definition of which states should become active or inactive if the transition succeeds. This makes state management more robust and predictable, as the framework doesn't have to guess the outcome. This corresponds to builder methods like
.addToActivate(ISLAND).
Dynamic Transitions for Hidden States
In addition to these statically defined transitions, Brobot also supports dynamic transitions to handle common UI patterns like menus and pop-ups. When a state opens and covers another, the covered state is registered as "hidden."
You can then define a transition with a dynamic target called PREVIOUS. When this transition is executed (e.g., by closing the menu), the framework intelligently navigates back to whatever state was most recently hidden, without you needing to pre-define every possible combination.